Robots fascinate all of us. While few robots are just fun toys many other robots can perform many complex tasks for us. In past decade the field of robotics has advanced by leaps and bounces making robots smarter and smarter. We have created robots, which can explore terrains- terrestrial as well as extra-terrestrial-, where even humans haven't reached. To traverse a terrain with obstacles legged robots have been constructed as an alternative to robots with wheels. Obviously legged design is biologically inspired. These robots must be able to run, crawl, jump, etc. depending on the terrain. So, as for animals and birds, jumping becomes an important activity for these robots too. If we take a closer look at our experience of jumping, we realize that jumping is a transient activity and hence it involves transient bodily forces. To jump we deform our body in some way, e.g. bend our knees before a squat jump, take a run up for a long jump etc., depending on whether we want to jump higher, longer or quicker. Many times we choose a mechanism of jump intuitively or from our past experiences. Although, designing a jumping robot and finding an optimal jumping mechanism (with which it can jump higher, longer or quicker as per the needs of the situation) are very complex problems indeed. For a robot energy consumed in a jump also becomes an important factor to be considered. Simple experimental/ theoretical models play essential role in solving such complex problems, since these models are easy to analyze and easy to test and hence are guiding tools to understand principles governing the complex problem.
Recently a team of researchers from the School of Mechanical Engineering and School of Physics at the Georgia Institute of Technology (Georgia Tech) in the state of Georgia, USA designed a simplistic jumping robot and analyzed in detail different forces and parameters involved in jumping and especially the lift-off mechanism. The research paper about this study has been accepted for publication in the Physical Review Letters journal. As a physicist and also being a fan of robotics ever since childhood, it intrigues me how a simple design and experimental/theoretical model used by these researchers not only improves our understanding of robotic jumping, but also gives us an insight into a common human (and animals' and birds') activity of jumping and that is why I felt compelled to share this recently published research on this blog.
The jumping robot used in the study is a simple one dimensional mass-spring system with an actuated mass. The actuator was mounted on the spring system such that the actuator can move in an almost frictionless fashion. When the actuator is accelerated to oscillate in a certain way, the spring gets compressed. This provides a thrust and the robot can lift-off. The robot was jumped off an almost-rigid aluminium surface. To understand what their study revealed, we need to quickly revise some basic terms, like 'amplitude', 'frequency', 'phase' of 'spring-oscillations'.
Consider a mass suspended from one end of a spring with the other end of the spring fixed to a rigid ceiling. Now if the spring is compressed or stretched and then released, then the mass oscillates in a way similar to figure 1. Observe how the position of the mass changes with time and note down the average position of the mass. We see that the up-and-down displacements of the mass go through a specific sequence repeatedly. The upward displacement is counted as positive and downward as negative. Starting from any particular displacement, then going through a sequence of displacements before coming back to the displacement considered at the start, is called one Oscillation of the mass-spring system. Number of oscillations performed in one second is called the Frequency ( f ) of the oscillations and is measured in Hertz (Hz). The maximum displacement from the average position during an oscillation is called the Amplitude ( A ) of the oscillations. Since this sequence of displacement repeats, it is analogous to moving along a circle, where we reach the same point on the circle again and again. With this analogy, completing half of the oscillation is analogous to moving through half of the circle or through 180° angle (entire circle is 360°). Starting from zero displacement from average position is like starting from angle 0° on the circle and completing one oscillation is same as traversing 360° angle on the circle. This angular measure of the 'displacement during oscillations' is called the Phase of the oscillations. Thus, to set the mass into oscillations initially if the mass is
Hereafter, in this post we'll use the word 'Phase' and letter phi ( Φ ) to refer to the 'Initial Phase'.
Now, let us look at the results of the study performed by the Georgia Tech. researchers. The team of researchers found that the forces involved in jumping are sensitive to the amplitude, phase and frequency of the actuator. It was revealed that not only the oscillating state of the actuator but also the transient state, when the actuator is in process of achieving the speed and acceleration of the initial phase, plays a significant role in optimizing the jump. The team tested 6720 different combinations of the frequency f and phase Φ of the actuator. Computer simulations of jumps were also carried out for the same ranges of frequencies and phases.
It was found that two types of lift-offs can result in highest jumps. A 'Simple Jump' and a 'Stutter Jump'. A simple jump is like a squat jump (figure 2). In a stutter jump (like a double jump, figure 3) the robot performs a smaller jump followed by a higher jump. The stutter jump was unexpectedly revealed as an optimal jumping mechanism both experimentally and in computer simulations and the initial transient forces on the actuator are the ones responsible for optimizing the stutter jump. Primates like Galagos (bushbabies) have been observed to use such a double jump to jump to a higher platform. The animation of these two robotic jumps can be found on the webpage about this publication here. For interactive demo of jumps of this simple robot check out this webpage, where you can change jump parameters and simulate the jump.
Counter-intuitively highest jumps did not occur at the resonant frequency of the mass-spring system. The highest simple jump occurs at a frequency higher than the resonant frequency and at phases of about 270°. On the other hand, the highest stutter jump occurs at a frequency lower than the resonant frequency and at phases around 90°. With the highest jump of either type the robot can achieve nearly same heights.
Both the jumping strategies have their advantages and disadvantages. One of them should be chosen based on the situation. A simple jump, like our squat jump, is a quicker jump. But, the power consumed by the robot to lift-off was observed to be directly proportional to ~f3. Since the frequency required for highest simple jump is greater than that for the highest stutter jump, with a stutter jump the robot can reach nearly the same height but consuming considerably less power. Since a double jump is required in a stutter jump, this lift-off mechanism is also the slower one among two optimal mechanisms.
Truly this simplistic model has given us a greater insight into the roles played by steady state and especially the transient forces in optimizing jump of a legged robot. It also helps us to gain a better understanding of one of our common activities, jumping! The researchers acknowledge that it'd be interesting to investigate the optimal jumping strategies with more complex designs and in different environments, e.g. jumping off deformable surfaces like sand or off a non-flat surface, jumps with more complex actuators etc. Studies of locomotion of legged robots is underway at many research institutes and labs around the globe.
 |
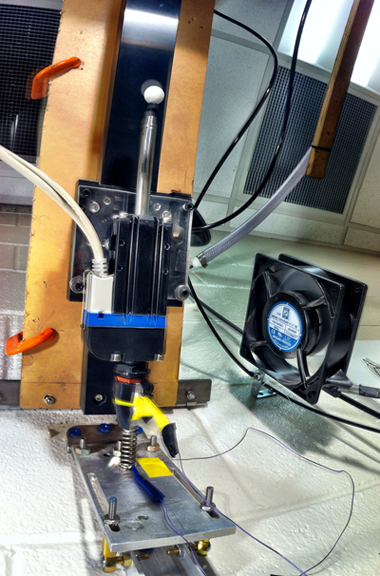
| Figure 1: Experimental setup Source: CRABLAB @ GeorgiaTech |
{kind=link}
The jumping robot used in the study is a simple one dimensional mass-spring system with an actuated mass. The actuator was mounted on the spring system such that the actuator can move in an almost frictionless fashion. When the actuator is accelerated to oscillate in a certain way, the spring gets compressed. This provides a thrust and the robot can lift-off. The robot was jumped off an almost-rigid aluminium surface. To understand what their study revealed, we need to quickly revise some basic terms, like 'amplitude', 'frequency', 'phase' of 'spring-oscillations'.
 |
| Figure 2: Oscillating 1D mass-spring system. Source- Wikipedia |
- given an upward push, then the Initial Phase ( Φ ) is 0° (equivalent to Φ°= 360°),
- moved up and then released, the Φ = 90°,
- given a downward push, then the Φ = 180°,
- moved down and then released, Φ = 270° and so on.
Hereafter, in this post we'll use the word 'Phase' and letter phi ( Φ ) to refer to the 'Initial Phase'.
Now, let us look at the results of the study performed by the Georgia Tech. researchers. The team of researchers found that the forces involved in jumping are sensitive to the amplitude, phase and frequency of the actuator. It was revealed that not only the oscillating state of the actuator but also the transient state, when the actuator is in process of achieving the speed and acceleration of the initial phase, plays a significant role in optimizing the jump. The team tested 6720 different combinations of the frequency f and phase Φ of the actuator. Computer simulations of jumps were also carried out for the same ranges of frequencies and phases.
 |
| Figure 3: Squat jump (stickfigure visualization) |
 |
| Figure 4: Double jump (stickfigure visualization) |
Both the jumping strategies have their advantages and disadvantages. One of them should be chosen based on the situation. A simple jump, like our squat jump, is a quicker jump. But, the power consumed by the robot to lift-off was observed to be directly proportional to ~f3. Since the frequency required for highest simple jump is greater than that for the highest stutter jump, with a stutter jump the robot can reach nearly the same height but consuming considerably less power. Since a double jump is required in a stutter jump, this lift-off mechanism is also the slower one among two optimal mechanisms.
Truly this simplistic model has given us a greater insight into the roles played by steady state and especially the transient forces in optimizing jump of a legged robot. It also helps us to gain a better understanding of one of our common activities, jumping! The researchers acknowledge that it'd be interesting to investigate the optimal jumping strategies with more complex designs and in different environments, e.g. jumping off deformable surfaces like sand or off a non-flat surface, jumps with more complex actuators etc. Studies of locomotion of legged robots is underway at many research institutes and labs around the globe.
Reference:
Aguilar, J., Lesov, A., Wiesenfeld, K., & Goldman, D. (2012). Lift-Off Dynamics in a Simple Jumping Robot Physical Review Letters, 109 (17) DOI: 10.1103/PhysRevLett.109.174301
The arXiv version of this paper can be found here.
you're welcome.
ReplyDelete